Automatico EXT con IO esterno
Modulo IO Esterno
Il sistema utilizza un modulo di I/O esterno Beckhoff per la gestione dei segnali del robot KUKA.

Logica dei ponticelli
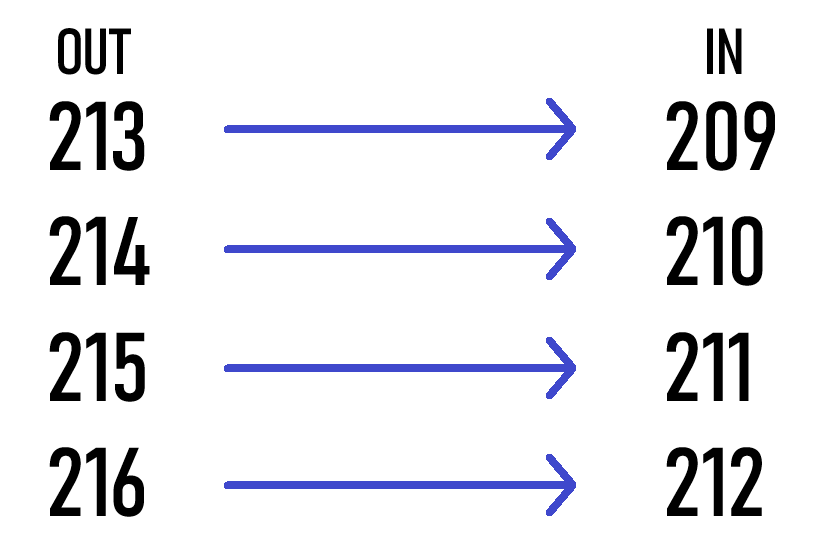
I segnali di ingresso richiesti dal controllore KUKA vengono ottenuti tramite ponticellatura delle uscite selezionate sul modulo di I/O esterno. La numerazione degli I/O segue lo schema illustrato nell’immagine seguente.
Configurazione dei segnali di sistema
Come primo passo, è necessario configurare il file:
STEU → Mada → $machine.dat
Andando ad assegnare ai vari segnali, gli ingressi EtherCAT:
SIGNAL $EXT_START $IN[209] ;EXTERNER START
SIGNAL $MOVE_ENABLE $IN[210] ;FAHRFREIGABE GESAMT
SIGNAL $CONF_MESS $IN[211] ;EXTERNE QUITTUNG
SIGNAL $DRIVES_ON $IN[212] ;ANTRIEBE EINConfigurazione delle uscite
Le uscite utilizzate per la gestione dei segnali EXT devono essere definite nel file IO.dat, come mostrato di seguito.
File IO.dat:
GLOBAL SIGNAL out_SYS_ExtStart $OUT[213]
GLOBAL SIGNAL out_SYS_MoveEnable $OUT[214]
GLOBAL SIGNAL out_SYS_ConfMess $OUT[215]
GLOBAL SIGNAL out_SYS_DrivesOn $OUT[216]A questo punto, la configurazione degli ingressi e delle uscite risulta completata.
Gestione SPS e modalità EXT
All’interno del controllore KUKA è presente un programma SPS che gestisce, tramite interrupt, i segnali di Start, Stop e le altre funzioni di controllo in modalità EXT.
Questo programma è denominato ExtManager.sub e contiene il seguente codice:
&ACCESS RVP
&COMMENT USER specified PLC program
DEF ExtManager ( )
;FOLD DECLARATIONS
;FOLD USER DECL
; Please insert user defined declarations
;ENDFOLD (USER DECL)
;ENDFOLD (DECLARATIONS)
;FOLD INI
;FOLD USER INIT
; Please insert user defined initialization commands
INTERRUPT DECL nStopBtn WHEN inStopRobot DO EXT_STOP() ;Nel caso in cui l'ingresso del pulsante di stop sia negato, basta mettere NOT
INTERRUPT ON nStopBtn
INTERRUPT DECL nStartBtn WHEN inStartRobot DO EXT_START()
INTERRUPT ON nStartBtn
INTERRUPT DECL nIntExtSelect WHEN $EXT DO EXT_SELECT()
INTERRUPT ON nIntExtSelect
;ENDFOLD (USER INIT)
;ENDFOLD (INI)
LOOP
IF NOT out_SYS_MoveEnable THEN
out_SYS_MoveEnable = TRUE
ENDIF
ENDLOOP
END
DEF EXT_INI ()
out_SYS_ExtStart = FALSE
out_SYS_ConfMess = FALSE
out_SYS_DrivesOn = FALSE
END
DEF EXT_STOP()
DECL STATE_T STAT
DECL MODUS_T MODE
INTERRUPT OFF nStartBtn
MODE=#SYNC
IF $PRO_STATE1 <> #P_FREE THEN
CWRITE($CMD,STAT,MODE,"STOP 1")
ENDIF
INTERRUPT ON nStartBtn
END
DEF EXT_START()
INTERRUPT OFF nStartBtn
IF (NOT $PRO_ACT)THEN
EXT_INI()
$TIMER[nTimeOutExt] = - tTimeOutExt
$TIMER_STOP[nTimeOutExt] = FALSE
nExtState = 0
WHILE NOT $TIMER_FLAG[nTimeOutExt]
SWITCH nExtState
CASE 0
IF NOT $PERI_RDY THEN
out_SYS_DrivesOn = TRUE
nExtState = 0
ELSE
out_SYS_DrivesOn = FALSE
nExtState = 1
ENDIF
CASE 1
IF $STOPMESS THEN
out_SYS_ConfMess = TRUE
nExtState = 1
ELSE
out_SYS_ConfMess = FALSE
nExtState = 2
ENDIF
CASE 2
IF NOT $PRO_ACT THEN
out_SYS_ExtStart = TRUE
nExtState = 2
ELSE
out_SYS_ExtStart = FALSE
nExtState = 3
ENDIF
CASE 3
$TIMER_STOP[nTimeOutExt] = TRUE
nExtState = 0
EXIT
ENDSWITCH
ENDWHILE
EXT_INI ()
ENDIF
INTERRUPT ON nStartBtn
END
DEF EXT_SELECT ()
DECL STATE_T STAT
DECL MODUS_T MODE
INTERRUPT OFF nIntExtSelect
MODE=#SYNC
IF $PRO_STATE1 == #P_FREE THEN
CWRITE($CMD,STAT,MODE,"RUN /R1/MAIN()")
CWRITE($CMD,STAT,MODE,"STOP 1")
CWRITE($CMD,STAT,MODE,"RESET 1")
ENDIF
INTERRUPT ON nIntExtSelect
ENDIn questo contesto, il timer utilizzato per la gestione dello Start fa riferimento alla variabile nTimeOutExt, definita nel file Globals.dat.
No comments to display
No comments to display